
BisonCore Collision Avoidance/GPS Denied Navigation operating in hallway
{kind=link}
{kind=link}
{kind=link}
Detailed Description
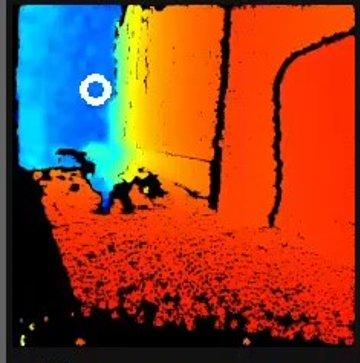
USGS National Innovation Center UAS Research Center's BisonCore Project, augments an autonomous rover to navigate around obstacles through a hallway, in a GPS Denied Environment. Augmentation done through payload directed operations on data from stereo depth sensors. White circle depicts vehicle’s desired direction.
Sources/Usage
Public Domain.
Related

BisonCore Project
The BisonCore is a system from the UAS Research Center that adds new and cutting-edge technology to commercial-off-the-shelf (COTS) uncrewed systems (UxS). The BisonCore is a “Multi‐Role Autonomous Vehicle Augmentation System” specifically designed to accommodate Science Payloads & Missions. The system adds a multitude of capabilities that are not available on either Department of Interior (DOI)...
Related
BisonCore Project
The BisonCore is a system from the UAS Research Center that adds new and cutting-edge technology to commercial-off-the-shelf (COTS) uncrewed systems (UxS). The BisonCore is a “Multi‐Role Autonomous Vehicle Augmentation System” specifically designed to accommodate Science Payloads & Missions. The system adds a multitude of capabilities that are not available on either Department of Interior (DOI)...