Resource Library
This library provides a checklist for Elevation-Derived Hydrographic (EDH) features, topology and network rules and a quality check method for relative positional accuracy as well as access to EDH metadata template(s).
Help Guide
Checklist for Elevation-Derived Hydrographic Features
Topology and Network Rules
Relative Positional Accuracy Quality Check Method
Metadata Template(s)
For more information about the Lidar Base Specification XML metadata files, please visit this site.
Help Guide
Checklist for Elevation-Derived Hydrographic Features
1. UniqueIDs.
2. Feature codes: All features must have an EClass and FCode associated with it.
3. Connectivity: All flowlines must be connected at nodes, without gaps, crossed lines, or overshoots
4. Topology
a. All polygons must be closed.
b. All polygons must have nodes at the intersections with single line stream features.
c. All polygons must have artificial paths.
d. All line features must be single unsplit segments, unless split by culvert features.
3. No dangling segments less than 1 meter long.
5. Completeness:
a. All NHD features that are currently visible or known to exist are present within the dataset.
b. Linework has been added if there were clear discrepancies in density due to artificial boundaries such as quadrangle boundaries in the NHD. This is completed within a minimum unit of HUC12 boundary.
c. All new linework has been checked to see if it is visible in the lidar surface, imagery or lidar intensity data. If linework is not visible in these sources, a model or justification for including the linework is included in the comments or metadata.
6. Z-values:
a. All features have 3D geometry with z-values assigned to each point, node and/or vertex.
b. All single line flowlines and double line stream features maintain downstream monotonicity.
c. Lake/ponds and reservoir waterbody polygons shall be at an elevation at or below the immediately surrounding terrain.
d. Lake/ponds and reservoir waterbody polygons shall be flat and level with a single elevation value for every shoreline vertex.
e. All features are at or just below (within the vertical accuracy) of the lidar elevation surface.
7. QC of feature placement:
a. For all features errors in measurements of 3 meters from visible features on the elevation surface as follows:
i. For points, the point shall be within 3 meters from the location of the feature boundary.
ii. For centerlines, the line shall be not be within an inside-buffer of 3 meters of the visible boundary of the feature.If the feature is less than 10 meters wide, the line shall not touch the boundary.

b. For polygons, the polygons shall be +- 3 meters from the visible boundary of the feature, following the provided elehydro capture conditions.
c. A sampling method will be used to verify a subset of features for positional accuracy. These measures could be used to calculate relative RMSE (use methods described in section x, of Capture Requirements).
8. Metadata is complete and contains description of process or models used to determine location of stream features.
Topology and Network Rules
A. Topology
1. Hydrographic features shall be checked to ensure they are topologically correct.
2. The following topology rules shall be used:
a. Points:
i. A sink feature will be used at the end of an isolated network.
b. Lines shall:
i. have nodes that are snapped together where appropriate (where one stream segment flows into the next) and have no “dangles,” or “overshoots”
ii. not overlap other lines
iii. not self overlap
iv. not self intersect
v. be single part
vi. be segmented at confluences only, unless the FClass changes between segments
1. Exception - culverts
c. Polygons shall
i. not have overlapping portions between polygon waterbodies
ii. not have overlapping portions within individual waterbodies
B. Geometric Network
1. Hydrographic flowlines shall be checked to ensure the network routes appropriately.
a. All isolated networks are verified that they should not be connected to any other features.
2. Hydrographic flowlines shall be digitized in the downstream flow direction.
Relative Positional Accuracy Quality Check Method
Ideally all, or as many features as possible should be visually inspected to make sure that they meet the accuracy standards described in this specification. A subset of features should be closely reviewed to determine the accuracy of the dataset.
In order to do a holistic review of the dataset, the features that are reviewed should be:
-
representative of all features in the dataset, so should contain at least one feature for each EClass and FCode present in the dataset
-
representative of the complete geographic area of the dataset, so should have features distributed within each 12-digit HU that intersects the DPA
-
representative of the special cases that make up features, including, but not limited to:
-
headwaters
-
confluences between stream/river reaches
-
intersections with polygons and stream features
-
canal/ditch features
-
isolated networks
-
drainageway
-
intersections near roads
-
culverts
-
islands within polygon features
-
-
representative of land cover, geologic types, and geophysical regions, including but not limited to:
-
urban areas
-
swamp/marsh areas
-
very low slope areas
-
In order to assess the relative accuracy of the hydrographic features that were derived from lidar, the guidelines ASPRS recommends for number of checkpoints for lidar may be followed to select the number of features to review within a DPA. This is the minimum number of features needed, and additional features may be needed in order to create a representative sample of the DPA. A randomized method should be implemented to choose features when possible.
[See ASPRS Positional Accuracy Standards for Digital Geospatial Data (EDITION 1, VERSION 1.0. - NOVEMBER, 2014), Table C.1 Recommended Number of Checkpoints Based on Area]
Positional accuracy can be done by following these guidelines, based on type of feature.
Viewing the data at a scale of 1:1,000 is recommended.
Point:
Only two types of point features are required for capture: Dams/weirs and Sink/rise. These point features can represent a large feature, such as a large dam, or a large depression which require some judgement of the operator for optimal placement.
The points should be evaluated by the following :
-
a visual inspection of the feature against the lidar surface and any high-resolution imagery
-
On a high spot or low spot of the feature, or on a section of the feature that represents the elevation and position of that feature.
-
The accuracy should be measured by drawing a cross-section on the lidar surface, and measuring the distance from a high or low point in the terrain, as appropriate to the feature type.
-
-
The horizontal difference between the feature and the source.
-
A distance from the point to the target area on the lidar surface will be measured. This may be subjective since a point feature may represent a large area. If it is within the appropriate area, the distance between feature and target can be recorded as 0.
-
-
The vertical difference between the feature and the source:
Line:
For each feature selected that is a 1D feature, the accuracy will be evaluated by:
-
a visual inspection of the feature against the lidar surface and any high-resolution imagery
-
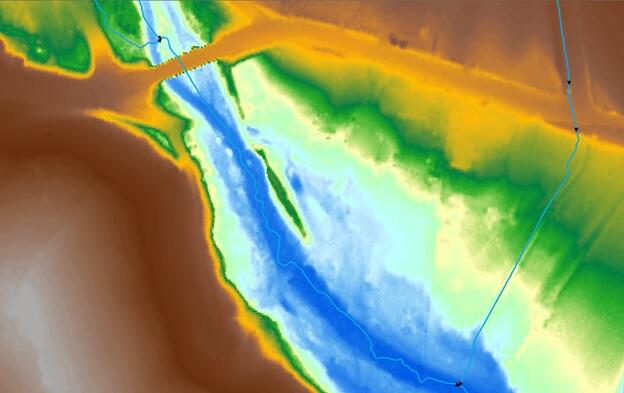
Measurements at 3 locations along the line, near the upstream end, middle and downstream end of the feature. Measurements will be made from the line segment and the midpoint of the channel that is present in the lidar.
Headwater:
Lines up with hillshade valley:
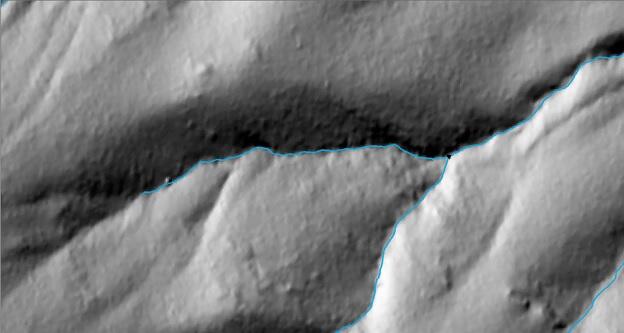
Follows contours of the elevation surface:

Imagery does not indicate errors:
Therefore we can conclude that the upstream, midpoint and downstream portions of the stream segment are within the channel so horizontal and vertical differences = 0 meters.
Wider river, just less than 15 meters wide, so captured as a single line stream.