
Logo in support of the 7th Federal UxS Users Workshop to be hosted March 16-18, 2027
Images
Imagery and Infographics in support of National Innovation Center activities
Filter Total Items: 43
7th Federal UxS Users Workshop
Logo in support of the 7th Federal UxS Users Workshop to be hosted March 16-18, 2027

Attendees of the 6th Federal Uncrewed Systems (UxS) Users Workshop
Attendees of the 6th Federal Uncrewed Systems (UxS) Users WorkshopAerial photo of attendees at the 6th Federal Uncrewed Systems (UxS) Workshop taken from a Skydio drone in front of the Science and Technology building at the Southwestern Indian Polytechnic Institute, Albuquerque, New Mexico.
Attendees of the 6th Federal Uncrewed Systems (UxS) Users Workshop
Attendees of the 6th Federal Uncrewed Systems (UxS) Users WorkshopAerial photo of attendees at the 6th Federal Uncrewed Systems (UxS) Workshop taken from a Skydio drone in front of the Science and Technology building at the Southwestern Indian Polytechnic Institute, Albuquerque, New Mexico.

Saucer Shark Aeroshell and payload suspended by sling
Saucer Shark Aeroshell and payload suspended by slingUSGS National Innovation Center UAS Research Center Saucer Shark Project, before science flight tests, Aeroshell and payload. Sling configuration and payload orientation verified before science flight deployment. Payload is on and ready to record!
Saucer Shark Aeroshell and payload suspended by sling
Saucer Shark Aeroshell and payload suspended by slingUSGS National Innovation Center UAS Research Center Saucer Shark Project, before science flight tests, Aeroshell and payload. Sling configuration and payload orientation verified before science flight deployment. Payload is on and ready to record!

BisonCore (MagEdition) displays live magnetic data (top) and lidar altitude (bottom)
BisonCore (MagEdition) displays live magnetic data (top) and lidar altitude (bottom)USGS National Innovation Center UAS Research Center Saucer Shark Project, BisonCore displays the path of the sensor live, as it covers transects. Data received from the payload is then displayed within the BisonCore Ecosystem and is accessible for field viewing. The magnetic map is also used to validate payload directed algorithms.
BisonCore (MagEdition) displays live magnetic data (top) and lidar altitude (bottom)
BisonCore (MagEdition) displays live magnetic data (top) and lidar altitude (bottom)USGS National Innovation Center UAS Research Center Saucer Shark Project, BisonCore displays the path of the sensor live, as it covers transects. Data received from the payload is then displayed within the BisonCore Ecosystem and is accessible for field viewing. The magnetic map is also used to validate payload directed algorithms.

Flying Saucer Shark Deployed over the skies of California
Flying Saucer Shark Deployed over the skies of CaliforniaUSGS National Innovation Center UAS Research Center Saucer Shark Project, during flight tests, aeroshell. Saucer Shark on landing approach after completed mission. Just above the landing pad.
Flying Saucer Shark Deployed over the skies of California
Flying Saucer Shark Deployed over the skies of CaliforniaUSGS National Innovation Center UAS Research Center Saucer Shark Project, during flight tests, aeroshell. Saucer Shark on landing approach after completed mission. Just above the landing pad.

Saucer Shark Drop Release during testing campaign
USGS National Innovation Center UAS Research Center Saucer Shark Project, during flight tests, drop release attached to USGS UAV. Aircraft sits on landing pad in-between test flights.
USGS National Innovation Center UAS Research Center Saucer Shark Project, during flight tests, drop release attached to USGS UAV. Aircraft sits on landing pad in-between test flights.

Saucer Shark Deployed Below UAV
USGS National Innovation Center UAS Research Center (UASRC) Saucer Shark Project, during flight tests, fully assembled. Sub assemblies from top down: Drop Release, Sling and Sling Brace, Payload Aeroshell and Payload.
USGS National Innovation Center UAS Research Center (UASRC) Saucer Shark Project, during flight tests, fully assembled. Sub assemblies from top down: Drop Release, Sling and Sling Brace, Payload Aeroshell and Payload.

Southern Craters on the moon
This is a compilation of several images from Lunar Reconnaissance Orbiter (LRO) Wide Angle Camera pulled from USGS Astro servers and displayed and rendered on the Celestial Mapping System software for craters located on the Lunar south poles
This is a compilation of several images from Lunar Reconnaissance Orbiter (LRO) Wide Angle Camera pulled from USGS Astro servers and displayed and rendered on the Celestial Mapping System software for craters located on the Lunar south poles

Mares on the moon
This is a compilation of several images from Lunar Reconnaissance Orbiter (LRO) Wide Angle Camera pulled from USGS Astro servers and displayed and rendered with help from the Celestial Mapping System software tool.
This is a compilation of several images from Lunar Reconnaissance Orbiter (LRO) Wide Angle Camera pulled from USGS Astro servers and displayed and rendered with help from the Celestial Mapping System software tool.
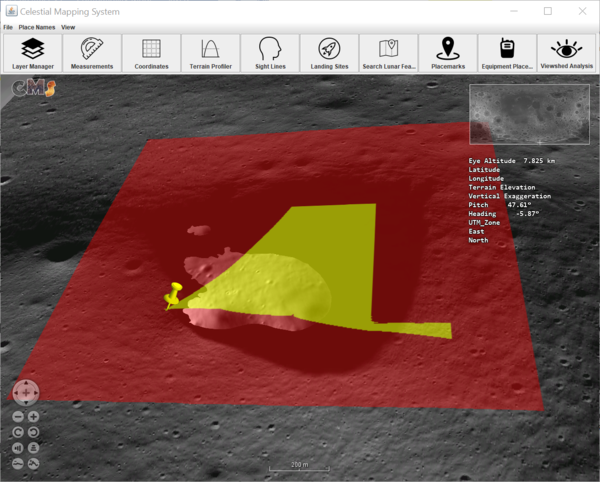
Visibility analysis of a permanently shadowed region located near Nobile crater
Visibility analysis of a permanently shadowed region located near Nobile craterShown in the image is a visibility analysis for an observer shown as yellow pin located outside the permanently shadowed regions (PSR). The image of PSR and visibility analysis is created with help of Celestial Mapping System tool from a selection of denoised images from NASA/HORUS project.
Visibility analysis of a permanently shadowed region located near Nobile crater
Visibility analysis of a permanently shadowed region located near Nobile craterShown in the image is a visibility analysis for an observer shown as yellow pin located outside the permanently shadowed regions (PSR). The image of PSR and visibility analysis is created with help of Celestial Mapping System tool from a selection of denoised images from NASA/HORUS project.

Space Economy Workshop Series
NASA and the United States Geological Survey (USGS) welcome the community to a series of Space Economy Workshops intended to coordinate the development of new technologies to detect and assess off-world mineral resources, as well as to discuss the challenges and opportunities for an off-world mineral resource economy.
NASA and the United States Geological Survey (USGS) welcome the community to a series of Space Economy Workshops intended to coordinate the development of new technologies to detect and assess off-world mineral resources, as well as to discuss the challenges and opportunities for an off-world mineral resource economy.

Preflight Checks at Mosquito
Isaac Anderson (National Innovation Center) preforms a pre-flight check of a UAS before a photogrammetry mission in post-fire, landslide-prone terrain in Tahoe National Forest.
Isaac Anderson (National Innovation Center) preforms a pre-flight check of a UAS before a photogrammetry mission in post-fire, landslide-prone terrain in Tahoe National Forest.

Drone at Sunset
A UAS flies a photogrammetry mission over recently burned landscapes in Tahoe National Forest.
A UAS flies a photogrammetry mission over recently burned landscapes in Tahoe National Forest.

Landing at Mosquito
Isaac Anderson and Liz Hyde (National Innovation Center) bring in a drone for a landing, after flying a photogrammetry mission over landslide-prone terrain recently burned in the Mosquito fire (2022).
Isaac Anderson and Liz Hyde (National Innovation Center) bring in a drone for a landing, after flying a photogrammetry mission over landslide-prone terrain recently burned in the Mosquito fire (2022).

Mosquito Ridge at Sunset
USGS researches and remote pilots coordinate their operations during a break in the action during a photogrammetry flight campaign in post-fire terrain in Tahoe National Forest.
USGS researches and remote pilots coordinate their operations during a break in the action during a photogrammetry flight campaign in post-fire terrain in Tahoe National Forest.

Test Platform Sandy the Rover uses BisonCore-Vehicle Formation Programs to follow Engineer around.
Test Platform Sandy the Rover uses BisonCore-Vehicle Formation Programs to follow Engineer around.UAS Research Center BisonCore Project, using onboard autopilot systems, BisonCore on Sandy the Rover instructs the Autopilot to deviate course to follow the UAS Engineer around the parking lot. Acting like a ‘duckling’.
Test Platform Sandy the Rover uses BisonCore-Vehicle Formation Programs to follow Engineer around.
Test Platform Sandy the Rover uses BisonCore-Vehicle Formation Programs to follow Engineer around.UAS Research Center BisonCore Project, using onboard autopilot systems, BisonCore on Sandy the Rover instructs the Autopilot to deviate course to follow the UAS Engineer around the parking lot. Acting like a ‘duckling’.

Visualized plot of BisonCore’s Vehicle Formation Programs’ predictive path
Visualized plot of BisonCore’s Vehicle Formation Programs’ predictive pathUASRC BisonCore Project, using onboard systems inherent to commercial-off-the-shelf (COTS) Autopilots, BisonCore-Vehicle Formation Program predicts the path of the vehicle ahead.
Visualized plot of BisonCore’s Vehicle Formation Programs’ predictive path
Visualized plot of BisonCore’s Vehicle Formation Programs’ predictive pathUASRC BisonCore Project, using onboard systems inherent to commercial-off-the-shelf (COTS) Autopilots, BisonCore-Vehicle Formation Program predicts the path of the vehicle ahead.

Saucer Shark project equipment identifying marker
Saucer Shark project equipment identifying markerUSGS NIC UASRC Saucer Shark equipment marker showing the Saucer flying over trees, with a ‘I WANT TO BELIEVE’ phrase below it.
Saucer Shark project equipment identifying marker
Saucer Shark project equipment identifying markerUSGS NIC UASRC Saucer Shark equipment marker showing the Saucer flying over trees, with a ‘I WANT TO BELIEVE’ phrase below it.

USGS and partner engineers with the NASA ER-2 aircraft
USGS and partner engineers with the NASA ER-2 aircraftLeft to Right: Trond Loke (Norsk Elektro Optikk), Isaac Anderson (USGS) and Liz Hyde (USGS) standing in front of the NASA ER-2 aircraft, during deployment to NASA Armstrong Flight Research Center, Palmdale, CA.
USGS and partner engineers with the NASA ER-2 aircraft
USGS and partner engineers with the NASA ER-2 aircraftLeft to Right: Trond Loke (Norsk Elektro Optikk), Isaac Anderson (USGS) and Liz Hyde (USGS) standing in front of the NASA ER-2 aircraft, during deployment to NASA Armstrong Flight Research Center, Palmdale, CA.

First natural color image from the high-altitude HySpex hyperspectral imaging sensor
First natural color image from the high-altitude HySpex hyperspectral imaging sensorNatural color image from the first flight of the high-altitude HySpex V-1240. Image is oriented with respect to true North, and is centered around Colombia, CA.
First natural color image from the high-altitude HySpex hyperspectral imaging sensor
First natural color image from the high-altitude HySpex hyperspectral imaging sensorNatural color image from the first flight of the high-altitude HySpex V-1240. Image is oriented with respect to true North, and is centered around Colombia, CA.

HySpex hyperspectral imaging sensor
High-altitude version of the HySpex Mjolnir V-1240 hyperspectral imaging sensor installed in the nose of the ER-2. This assembly is specially focused for high-altitude imagery and has a lightweight housing design for use on High Altitude Long Endurance UAS.
High-altitude version of the HySpex Mjolnir V-1240 hyperspectral imaging sensor installed in the nose of the ER-2. This assembly is specially focused for high-altitude imagery and has a lightweight housing design for use on High Altitude Long Endurance UAS.